算法竞赛 三维几何及常见例题 风铃夜行 2025-07-05 2025-12-11 三维几何及常见例题 三维几何必要初始化 点线面封装 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 struct Point3 { ld x, y, z; Point3 (ld x_ = 0 , ld y_ = 0 , ld z_ = 0 ) : x (x_), y (y_), z (z_) {} Point3 &operator +=(Point3 p) & { return x += p.x, y += p.y, z += p.z, *this ; } Point3 &operator -=(Point3 p) & { return x -= p.x, y -= p.y, z -= p.z, *this ; } Point3 &operator *=(Point3 p) & { return x *= p.x, y *= p.y, z *= p.z, *this ; } Point3 &operator *=(ld t) & { return x *= t, y *= t, z *= t, *this ; } Point3 &operator /=(ld t) & { return x /= t, y /= t, z /= t, *this ; } friend Point3 operator +(Point3 a, Point3 b) { return a += b; } friend Point3 operator -(Point3 a, Point3 b) { return a -= b; } friend Point3 operator *(Point3 a, Point3 b) { return a *= b; } friend Point3 operator *(Point3 a, ld b) { return a *= b; } friend Point3 operator *(ld a, Point3 b) { return b *= a; } friend Point3 operator /(Point3 a, ld b) { return a /= b; } friend auto &operator >>(istream &is, Point3 &p) { return is >> p.x >> p.y >> p.z; } friend auto &operator <<(ostream &os, Point3 p) { return os << "(" << p.x << ", " << p.y << ", " << p.z << ")" ; } }; struct Line3 { Point3 a, b; }; struct Plane { Point3 u, v, w; };
其他函数 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 ld len (P3 p) { return sqrt (p.x * p.x + p.y * p.y + p.z * p.z); } P3 crossEx (P3 a, P3 b) { P3 ans; ans.x = a.y * b.z - a.z * b.y; ans.y = a.z * b.x - a.x * b.z; ans.z = a.x * b.y - a.y * b.x; return ans; } ld cross (P3 a, P3 b) { return len (crossEx (a, b)); } ld dot (P3 a, P3 b) { return a.x * b.x + a.y * b.y + a.z * b.z; } P3 getVec (Plane s) { return crossEx (s.u - s.v, s.v - s.w); } ld dis (P3 a, P3 b) { ld val = (a.x - b.x) * (a.x - b.x) + (a.y - b.y) * (a.y - b.y) + (a.z - b.z) * (a.z - b.z); return sqrt (val); } P3 standardize (P3 vec) { return vec / len (vec); }
三维点线面相关 空间三点是否共线 其中第二个函数是专门用来判断给定的三个点能否构成平面的,因为不共线的三点才能构成平面。
1 2 3 4 5 6 bool onLine (P3 p1, P3 p2, P3 p3) return sign (cross (p1 - p2, p3 - p2)) == 0 ; } bool onLine (Plane s) return onLine (s.u, s.v, s.w); }
四点是否共面 1 2 3 4 bool onPlane (P3 p1, P3 p2, P3 p3, P3 p4) ld val = dot (getVec ({p1, p2, p3}), p4 - p1); return sign (val) == 0 ; }
空间点是否在线段上 1 2 3 4 5 6 7 8 9 10 bool pointOnSegment (P3 p, L3 l) return sign (cross (p - l.a, p - l.b)) == 0 && min (l.a.x, l.b.x) <= p.x && p.x <= max (l.a.x, l.b.x) && min (l.a.y, l.b.y) <= p.y && p.y <= max (l.a.y, l.b.y) && min (l.a.z, l.b.z) <= p.z && p.z <= max (l.a.z, l.b.z); } bool pointOnSegmentEx (P3 p, L3 l) return sign (cross (p - l.a, p - l.b)) == 0 && min (l.a.x, l.b.x) < p.x && p.x < max (l.a.x, l.b.x) && min (l.a.y, l.b.y) < p.y && p.y < max (l.a.y, l.b.y) && min (l.a.z, l.b.z) < p.z && p.z < max (l.a.z, l.b.z); }
空间两点是否在线段同侧 当给定的两点与线段不共面、点在线段上时返回
1 2 3 4 5 6 7 bool pointOnSegmentSide (P3 p1, P3 p2, L3 l) if (!onPlane (p1, p2, l.a, l.b)) { return 0 ; } ld val = dot (crossEx (l.a - l.b, p1 - l.b), crossEx (l.a - l.b, p2 - l.b)); return sign (val) == 1 ; }
两点是否在平面同侧 点在平面上时返回
1 2 3 4 bool pointOnPlaneSide (P3 p1, P3 p2, Plane s) ld val = dot (getVec (s), p1 - s.u) * dot (getVec (s), p2 - s.u); return sign (val) == 1 ; }
空间两直线是否平行/垂直 1 2 3 4 5 6 bool lineParallel (L3 l1, L3 l2) return sign (cross (l1. a - l1. b, l2. a - l2. b)) == 0 ; } bool lineVertical (L3 l1, L3 l2) return sign (dot (l1. a - l1. b, l2. a - l2. b)) == 0 ; }
两平面是否平行/垂直 1 2 3 4 5 6 7 8 bool planeParallel (Plane s1, Plane s2) ld val = cross (getVec (s1), getVec (s2)); return sign (val) == 0 ; } bool planeVertical (Plane s1, Plane s2) ld val = dot (getVec (s1), getVec (s2)); return sign (val) == 0 ; }
空间两直线是否是同一条 1 2 3 bool same (L3 l1, L3 l2) return lineParallel (l1, l2) && lineParallel ({l1. a, l2. b}, {l1. b, l2. a}); }
两平面是否是同一个 1 2 3 4 bool same (Plane s1, Plane s2) return onPlane (s1. u, s2. u, s2. v, s2. w) && onPlane (s1. v, s2. u, s2. v, s2. w) && onPlane (s1. w, s2. u, s2. v, s2. w); }
直线是否与平面平行 1 2 3 4 bool linePlaneParallel (L3 l, Plane s) ld val = dot (l.a - l.b, getVec (s)); return sign (val) == 0 ; }
空间两线段是否相交 1 2 3 4 5 6 7 8 9 10 11 12 13 14 bool segmentIntersection (L3 l1, L3 l2) if (!onPlane (l1. a, l1. b, l2. a, l2. b)) { return 0 ; } if (!onLine (l1. a, l1. b, l2. a) || !onLine (l1. a, l1. b, l2. b)) { return !pointOnSegmentSide (l1. a, l1. b, l2) && !pointOnSegmentSide (l2. a, l2. b, l1); } return pointOnSegment (l1. a, l2) || pointOnSegment (l1. b, l2) || pointOnSegment (l2. a, l1) || pointOnSegment (l2. b, l2); } bool segmentIntersection1 (L3 l1, L3 l2) return onPlane (l1. a, l1. b, l2. a, l2. b) && !pointOnSegmentSide (l1. a, l1. b, l2) && !pointOnSegmentSide (l2. a, l2. b, l1); }
空间两直线是否相交及交点 当两直线不共面、两直线平行时返回
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 pair<bool , P3> lineIntersection (L3 l1, L3 l2) { if (!onPlane (l1. a, l1. b, l2. a, l2. b) || lineParallel (l1, l2)) { return {0 , {}}; } auto [s1, e1] = l1; auto [s2, e2] = l2; ld val = 0 ; if (!onPlane (l1. a, l1. b, {0 , 0 , 0 }, {0 , 0 , 1 })) { val = ((s1. x - s2. x) * (s2. y - e2. y) - (s1. y - s2. y) * (s2. x - e2. x)) / ((s1. x - e1. x) * (s2. y - e2. y) - (s1. y - e1. y) * (s2. x - e2. x)); } else if (!onPlane (l1. a, l1. b, {0 , 0 , 0 }, {0 , 1 , 0 })) { val = ((s1. x - s2. x) * (s2. z - e2. z) - (s1. z - s2. z) * (s2. x - e2. x)) / ((s1. x - e1. x) * (s2. z - e2. z) - (s1. z - e1. z) * (s2. x - e2. x)); } else { val = ((s1. y - s2. y) * (s2. z - e2. z) - (s1. z - s2. z) * (s2. y - e2. y)) / ((s1. y - e1. y) * (s2. z - e2. z) - (s1. z - e1. z) * (s2. y - e2. y)); } return {1 , s1 + (e1 - s1) * val}; }
直线与平面是否相交及交点 当直线与平面平行、给定的点构不成平面时返回
1 2 3 4 5 6 7 8 9 pair<bool , P3> linePlaneCross (L3 l, Plane s) { if (linePlaneParallel (l, s)) { return {0 , {}}; } P3 vec = getVec (s); P3 U = vec * (s.u - l.a), V = vec * (l.b - l.a); ld val = (U.x + U.y + U.z) / (V.x + V.y + V.z); return {1 , l.a + (l.b - l.a) * val}; }
两平面是否相交及交线 当两平面平行、两平面为同一个时返回
1 2 3 4 5 6 7 8 9 10 pair<bool , L3> planeIntersection (Plane s1, Plane s2) { if (planeParallel (s1, s2) || same (s1, s2)) { return {0 , {}}; } P3 U = linePlaneParallel ({s2. u, s2. v}, s1) ? linePlaneCross ({s2. v, s2. w}, s1).second : linePlaneCross ({s2. u, s2. v}, s1).second; P3 V = linePlaneParallel ({s2. w, s2. u}, s1) ? linePlaneCross ({s2. v, s2. w}, s1).second : linePlaneCross ({s2. w, s2. u}, s1).second; return {1 , {U, V}}; }
点到直线的最近点与最近距离 1 2 3 4 5 pair<ld, P3> pointToLine (P3 p, L3 l) { ld val = cross (p - l.a, l.a - l.b) / dis (l.a, l.b); ld val1 = dot (p - l.a, l.a - l.b) / dis (l.a, l.b); return {val, l.a + val1 * standardize (l.a - l.b)}; }
点到平面的最近点与最近距离 1 2 3 4 5 6 pair<ld, P3> pointToPlane (P3 p, Plane s) { P3 vec = getVec (s); ld val = dot (vec, p - s.u); val = abs (val) / len (vec); return {val, p - val * standardize (vec)}; }
空间两直线的最近距离与最近点对 1 2 3 4 5 6 7 8 9 10 tuple<ld, P3, P3> lineToLine (L3 l1, L3 l2) { P3 vec = crossEx (l1. a - l1. b, l2. a - l2. b); ld val = abs (dot (l1. a - l2. a, vec)) / len (vec); P3 U = l1. b - l1. a, V = l2. b - l2. a; vec = crossEx (U, V); ld p = dot (vec, vec); ld t1 = dot (crossEx (l2. a - l1. a, V), vec) / p; ld t2 = dot (crossEx (l2. a - l1. a, U), vec) / p; return {val, l1. a + (l1. b - l1. a) * t1, l2. a + (l2. b - l2. a) * t2}; }
三维角度与弧度 空间两直线夹角的 cos 值 任意位置的空间两直线。
1 2 3 ld lineCos (L3 l1, L3 l2) { return dot (l1. a - l1. b, l2. a - l2. b) / len (l1. a - l1. b) / len (l2. a - l2. b); }
空间两平面夹角的 cos 值 1 2 3 4 ld planeCos (Plane s1, Plane s2) { P3 U = getVec (s1), V = getVec (s2); return dot (U, V) / len (U) / len (V); }
直线与平面夹角的 sin 值 1 2 3 4 ld linePlaneSin (L3 l, Plane s) { P3 vec = getVec (s); return dot (l.a - l.b, vec) / len (l.a - l.b) / len (vec); }
空间多边形 正N棱锥体积公式 棱锥通用体积公式
1 2 3 ld V (ld l, int n) { return l * l * l * n / (12 * tan (PI / n)) * sqrt (1 - 1 / (4 * sin (PI / n) * sin (PI / n))); }
四面体体积 1 2 3 ld V (P3 a, P3 b, P3 c, P3 d) { return abs (dot (d - a, crossEx (b - a, c - a))) / 6 ; }
点是否在空间三角形上 点位于边界上时返回
1 2 3 4 bool pointOnTriangle (P3 p, P3 p1, P3 p2, P3 p3) return pointOnSegmentSide (p, p1, {p2, p3}) && pointOnSegmentSide (p, p2, {p1, p3}) && pointOnSegmentSide (p, p3, {p1, p2}); }
线段是否与空间三角形相交及交点 只有交点在空间三角形内部时才视作相交。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 pair<bool , P3> segmentOnTriangle (P3 l, P3 r, P3 p1, P3 p2, P3 p3) { P3 x = crossEx (p2 - p1, p3 - p1); if (sign (dot (x, r - l)) == 0 ) { return {0 , {}}; } ld t = dot (x, p1 - l) / dot (x, r - l); if (t < 0 || t - 1 > 0 ) { return {0 , {}}; } bool type = pointOnTriangle (l + (r - l) * t, p1, p2, p3); if (type) { return {1 , l + (r - l) * t}; } else { return {0 , {}}; } }
空间三角形是否相交 相交线段在空间三角形内部时才视作相交。
1 2 3 4 5 6 7 8 9 10 11 bool triangleIntersection (vector<P3> a, vector<P3> b) for (int i = 0 ; i < 3 ; i++) { if (segmentOnTriangle (b[i], b[(i + 1 ) % 3 ], a[0 ], a[1 ], a[2 ]).first) { return 1 ; } if (segmentOnTriangle (a[i], a[(i + 1 ) % 3 ], b[0 ], b[1 ], b[2 ]).first) { return 1 ; } } return 0 ; }
常用结论 平面几何结论归档
hypot 函数可以直接计算直角三角形的斜边长;
边心距 是指正多边形的外接圆圆心到正多边形某一边的距离,边长为
三角形外接圆半径 为
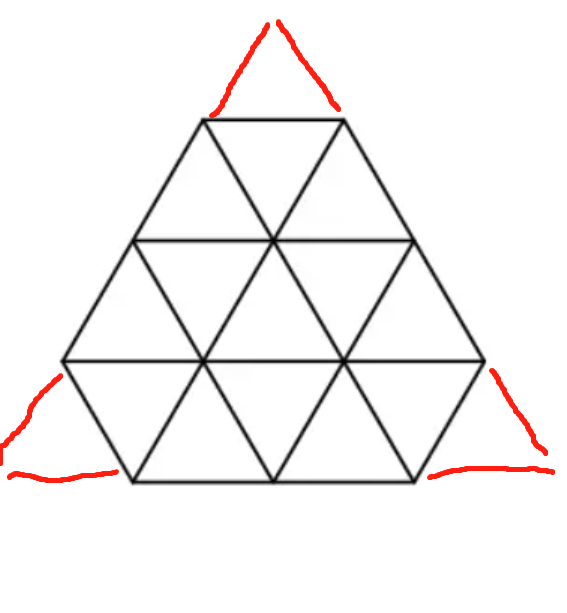
由小正三角形拼成的大正三角形,耗费的小三角形数量即为构成一条边的小三角形数量的平方。如下图,总数量即为 See 。
正 See 。
某一点
atan(y / x) 函数仅用于计算第一、四象限的值,而 atan2(y, x) 则允许计算所有四个象限的正反切,在使用这个函数时,需要尽量保证
在平面上有奇数个点 See 。
已知
海伦公式 :已知三角形三边长
棱台体积
正棱台侧面积
球面积
正三角形面积
设扇形对应的圆心角弧度为
立体几何结论归档
已知向量
常用例题 将平面某点旋转任意角度 题意:给定平面上一点
1 2 3 4 5 6 7 8 9 signed main () int a, b, d; cin >> a >> b >> d; ld l = hypot (a, b); ld alpha = atan2 (b, a) + toArc (d); cout << l * cos (alpha) << " " << l * sin (alpha) << endl ; }
平面最近点对(set解) 借助 set ,在严格
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 template <class T> T sqr (T x) return x * x; } using V = Point<int >;signed main () int n; cin >> n; vector<V> in (n) ; for (auto &it : in) { cin >> it; } int dis = disEx (in[0 ], in[1 ]); sort (in.begin (), in.end ()); set<V> S; for (int i = 0 , h = 0 ; i < n; i++) { V now = {in[i].y, in[i].x}; while (dis && dis <= sqr (in[i].x - in[h].x)) { S.erase ({in[h].y, in[h].x}); h++; } auto it = S.lower_bound (now); for (auto k = it; k != S.end () && sqr (k->x - now.x) < dis; k++) { dis = min (dis, disEx (*k, now)); } if (it != S.begin ()) { for (auto k = prev (it); sqr (k->x - now.x) < dis; k--) { dis = min (dis, disEx (*k, now)); if (k == S.begin ()) break ; } } S.insert (now); } cout << sqrt (dis) << endl; }
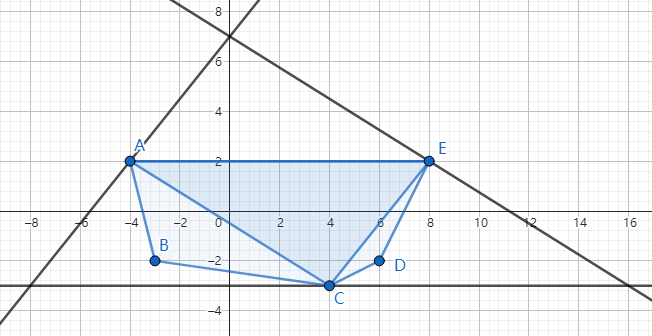
平面若干点能构成的最大四边形的面积(简单版,暴力枚举) 题意:平面上存在若干个点,保证没有两点重合、没有三点共线,你需要从中选出四个点,使得它们构成的四边形面积是最大的,注意这里能组成的四边形可以不是凸四边形。
暴力枚举其中一条对角线后枚举剩余两个点,
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 signed main () int n; cin >> n; vector<Pi> in (n) ; for (auto &it : in) { cin >> it; } ld ans = 0 ; for (int i = 0 ; i < n; i++) { for (int j = i + 1 ; j < n; j++) { ld l = 0 , r = 0 ; for (int k = 0 ; k < n; k++) { if (k == i || k == j) continue ; if (pointOnLineLeft (in[k], {in[i], in[j]})) { l = max (l, triangleS (in[k], in[j], in[i])); } else { r = max (r, triangleS (in[k], in[j], in[i])); } } if (l * r != 0 ) { ans = max (ans, l + r); } } } cout << ans << endl; }
平面若干点能构成的最大四边形的面积(困难版,分类讨论+旋转卡壳) 题意:平面上存在若干个点,可能存在多点重合、共线的情况,你需要从中选出四个点,使得它们构成的四边形面积是最大的,注意这里能组成的四边形可以不是凸四边形、可以是退化的四边形。
当凸包大小
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 using V = Point<int >;signed main () int Task = 1 ; for (cin >> Task; Task; Task--) { int n; cin >> n; vector<V> in_ (n) ; for (auto &it : in_) { cin >> it; } auto in = staticConvexHull (in_, 0 ); n = in.size (); int ans = 0 ; if (n > 3 ) { ans = rotatingCalipers (in); } else if (n == 3 ) { int area = triangleAreaEx (in[0 ], in[1 ], in[2 ]); for (auto it : in_) { if (it == in[0 ] || it == in[1 ] || it == in[2 ]) continue ; int Min = min ({triangleAreaEx (it, in[0 ], in[1 ]), triangleAreaEx (it, in[0 ], in[2 ]), triangleAreaEx (it, in[1 ], in[2 ])}); ans = max (ans, area - Min); } } cout << ans / 2 ; if (ans % 2 ) { cout << ".5" ; } cout << endl; } }
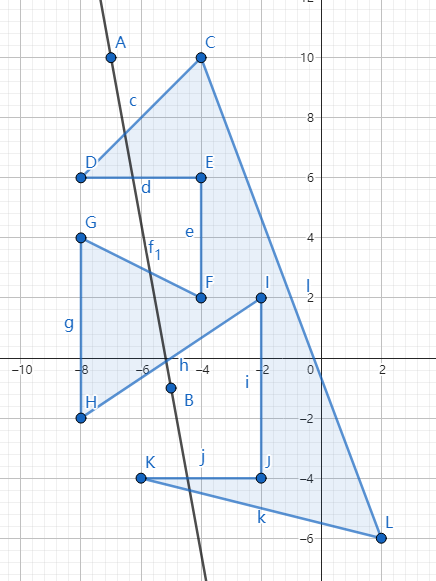
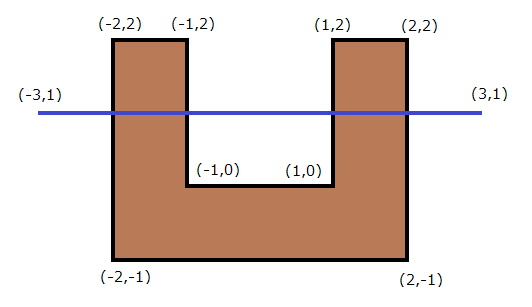
线段将多边形切割为几个部分 题意:给定平面上一线段与一个任意多边形,求解线段将多边形切割为几个部分;保证线段的端点不在多边形内、多边形边上,多边形顶点不位于线段上,多边形的边不与线段重叠;多边形端点按逆时针顺序给出。下方的几个样例均合法,答案均为
当线段切割多边形时,本质是与多边形的边交于两个点、或者说是与多边形的两条边相交,设交点数目为
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 signed main () Pi s, e; cin >> s >> e; int n; cin >> n; vector<Pi> in (n) ; for (auto &it : in) { cin >> it; } int cnt = 0 ; for (int i = 0 ; i < n; i++) { Pi x = in[i], y = in[(i + 1 ) % n]; cnt += (pointNotOnLineSide (x, y, {s, e}) && segmentIntersection (Line{x, y}, {s, e})); } cout << cnt / 2 + 1 << endl; }
平面若干点能否构成凸包(暴力枚举) 题意:给定平面上若干个点,判断其是否构成凸包 See 。
可以直接使用凸包模板,但是代码较长;在这里我们使用暴力枚举试点,也能以
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 signed main () int n; cin >> n; vector<Point<ld>> in (n); for (auto &it : in) { cin >> it; } for (int i = 0 ; i < n; i++) { auto A = in[(i - 1 + n) % n]; auto B = in[i]; auto C = in[(i + 1 ) % n]; if (cross (A - B, C - B) > 0 ) { cout << "No\n" ; return 0 ; } } cout << "Yes\n" ; }
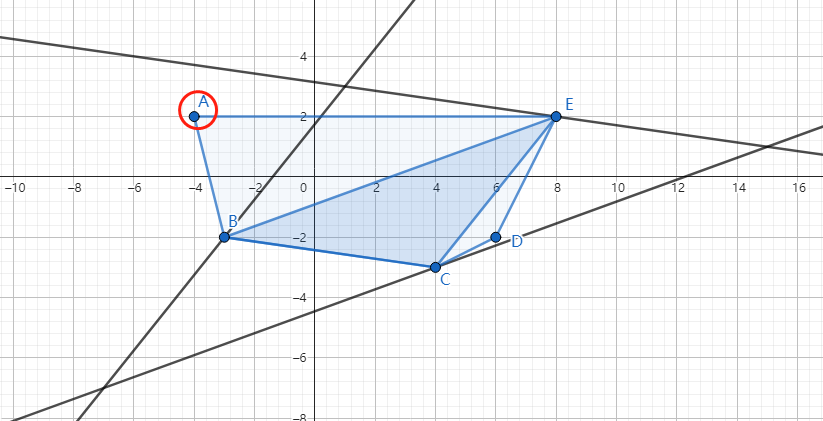
凸包上的点能构成的最大三角形(暴力枚举) 可以直接使用凸包模板,但是代码较长;在这里我们使用暴力枚举试点,也能以
另外补充一点性质:所求三角形的反互补三角形一定包含了凸包上的所有点(可以在边界)。通俗的说,构成的三角形是这个反互补三角形的中点三角形。如下图所示,点
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 signed main () int n; cin >> n; vector<Point<int >> in (n); for (auto &it : in) { cin >> it; } #define S(x, y, z) triangleAreaEx(in[x], in[y], in[z]) int i = 0 , j = 1 , k = 2 ; while (true ) { int val = S (i, j, k); if (S ((i + 1 ) % n, j, k) > val) { i = (i + 1 ) % n; } else if (S ((i - 1 + n) % n, j, k) > val) { i = (i - 1 + n) % n; } else if (S (i, (j + 1 ) % n, k) > val) { j = (j + 1 ) % n; } else if (S (i, (j - 1 + n) % n, k) > val) { j = (j - 1 + n) % n; } else if (S (i, j, (k + 1 ) % n) > val) { k = (k + 1 ) % n; } else if (S (i, j, (k - 1 + n) % n) > val) { k = (k - 1 + n) % n; } else { break ; } } cout << i + 1 << " " << j + 1 << " " << k + 1 << endl; }
凸包上的点能构成的最大四角形的面积(旋转卡壳) 由于是凸包上的点,所以保证了四边形一定是凸四边形,时间复杂度
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 template <class T> T rotatingCalipers (vector<Point<T>> &p) #define S(x, y, z) triangleAreaEx(p[x], p[y], p[z]) int n = p.size (); T ans = 0 ; auto nxt = [&](int i) -> int { return i == n - 1 ? 0 : i + 1 ; }; for (int i = 0 ; i < n; i++) { int p1 = nxt (i), p2 = nxt (nxt (nxt (i))); for (int j = nxt (nxt (i)); nxt (j) != i; j = nxt (j)) { while (nxt (p1) != j && S (i, j, nxt (p1)) > S (i, j, p1)) { p1 = nxt (p1); } if (p2 == j) { p2 = nxt (p2); } while (nxt (p2) != i && S (i, j, nxt (p2)) > S (i, j, p2)) { p2 = nxt (p2); } ans = max (ans, S (i, j, p1) + S (i, j, p2)); } } return ans; #undef S }
判断一个凸包是否完全在另一个凸包内 题意:给定一个凸多边形 例题 。
考虑严格包含,使用
/END/